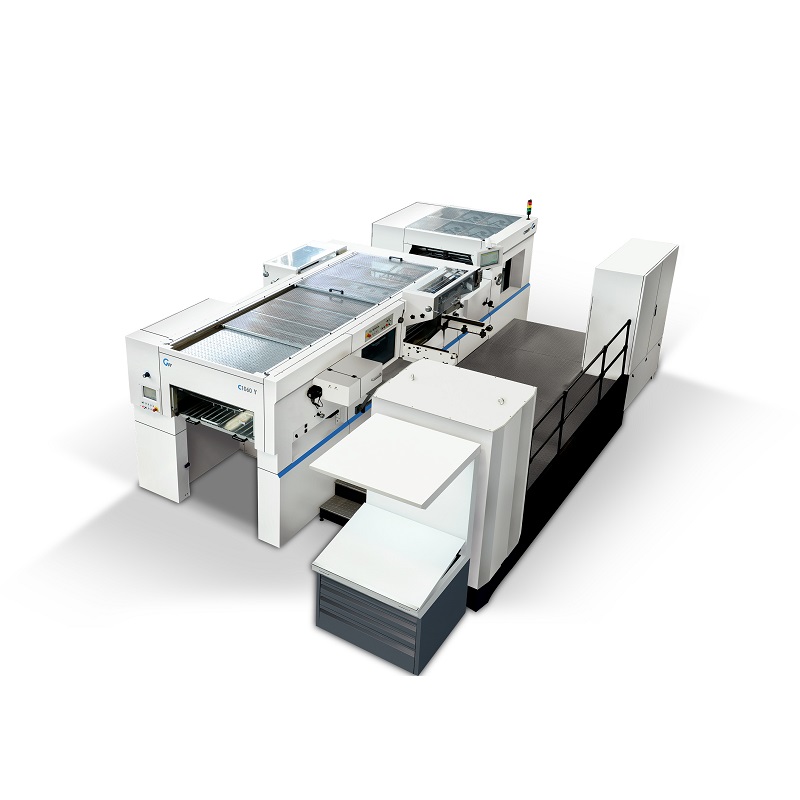





GUOWANG C-106Y Рӯйхати Иқтибосҳо барои мошини қолаббурӣ ва фольга
1. Агрегати хурокдихй
Таъминкунандаи сифати баланд, ки дар Чин сохта шудааст, бо 4 макканда барои коғазбардор ва 4 макканда барои интиқоли коғаз коғази устувор ва зудро таъмин мекунад.Баландӣ ва кунҷи маккандаҳо ба осонӣ танзим карда мешаванд, то варақҳоро комилан рост нигоҳ доранд.
Детектори механикии дукарата, дастгоҳи таъхирнопазир, шамолдиҳандаи танзимшавандаи ҳаворо таъмин мекунад, ки варақҳо ба мизи камар устувор ва дақиқ интиқол дода шаванд.
Насоси вакуумӣ аз Олмон Беккер аст.
Паҳлуи паҳлӯро тавассути муҳаррик барои ғизодиҳии дақиқи варақ танзим кардан мумкин аст.
Таҷҳизоти пешакии ғӯзапоя бо чӯби баланд (баландии максимум то 1600 мм) ғизодиҳии беистро анҷом медиҳад.
Дар паллетҳо, ки дар рельсҳо барои пешакӣ рехта мешаванд, чӯбҳои комил сохтан мумкин аст.Ин ба истеҳсоли ҳамвор саҳми назаррас мегузорад ва ба оператор имкон медиҳад, ки чӯбчаи омодашударо ба фидер дақиқ ва қулай интиқол диҳад.
Муфтаи механикии пневматикии ягонаи мавқеъро суғурта мекунад, ки варақи аввалро пас аз ҳар як аз нав ба кор андохтани мошин ҳамеша ба қабатҳои пешина интиқол дода мешавад, то ба осонӣ, сарфаи вақт ва сарфаи мавод омода шавад.
Лавҳаҳои паҳлӯӣ метавонанд мустақиман байни режими кашидан ва тела дар ҳар ду тарафи мошин танҳо тавассути гардиши болт бидуни илова ё хориҷ кардани қисмҳо иваз карда шаванд.Ин чандирии коркарди доираи васеи маводро таъмин мекунад: новобаста аз он ки аломатҳои регистр дар тарафи чап ё рости варақ ҷойгиранд.
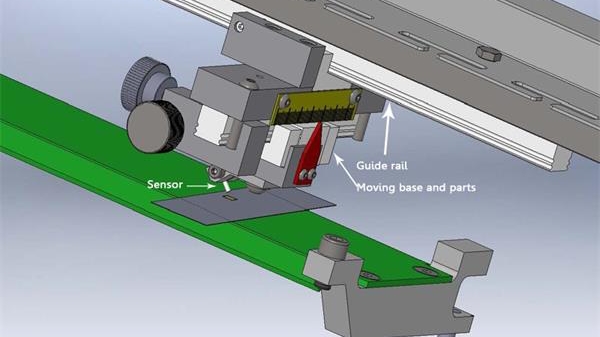
Ҷойҳои паҳлӯ ва пеш бо сенсорҳои оптикии дақиқ мавҷуданд, ки метавонанд ранги торик ва варақи пластикиро муайян кунанд.Ҳассосият танзимшаванда аст.
Сенсорҳои оптикӣ бо системаи таваққуфи автоматӣ дар мизи ғизо ба шумо имкон медиҳанд, ки мониторинги системаро оптимизатсия кунед - барои назорати ҳамаҷонибаи сифат аз болои тамоми паҳнои варақ ва роҳбандии коғаз.
Идоракунии гардонандаи алоҳида барои чӯбчаи асосӣ ва ёрирасон
PLC ва камераи электронӣ барои назорати вақт
Дастгоҳи зидди монеа метавонад зарари мошинро пешгирӣ кунад.
Japan Nitta тасмаи интиқолдиҳанда барои фидер ва суръат танзимшаванда аст
Панели амалиётӣ барои қисмҳои ғизодиҳӣ бо дисплейи LED назорати раванди ғизодиҳӣ осонтар аст.





2. Дастгоҳи қолаббурӣ
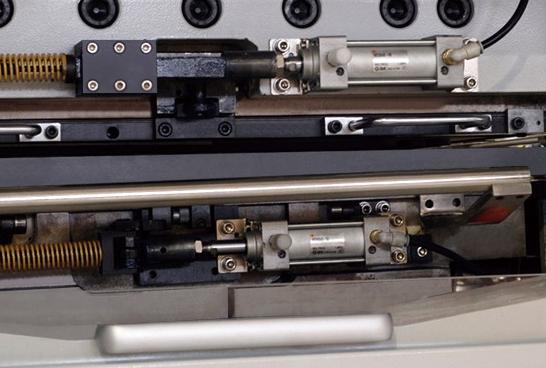
Системаи қулфи пневматикӣ қулф кардан ва озод кардани таъқиби буридан ва плитаи буриданро осонтар мекунад.
Лавҳаи буриши пневматикӣ барои слайди осон дар дохил ва берун.
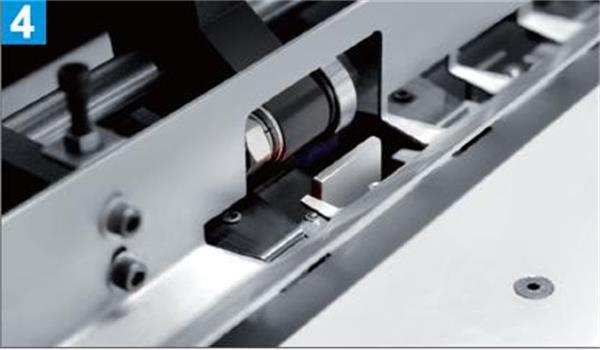
Системаи марказӣ оид ба таъқиби буридан бо танзими трансверсиалӣ бақайдгирии дақиқро таъмин мекунад, ки боиси зуд иваз шудани кор мегардад.
Ҷойгиркунии дақиқи таъқиби буриш тавассути сенсорҳои оптикии дақиқ бо дастгоҳи автоматии қулф назорат карда мешавад
Таҷҳизоти гардиши таъқиб буридан
Моторҳои асосии Siemens аз ҷониби инвертер Schneider идора карда мешаванд.
Танзими хурди қувваи буриш (дурустии фишор метавонад то 0,01 мм бошад, макс.Фишори буридан метавонад то 300 тонна бошад) тавассути фишанги кирм, ки бо муҳаррики серво идора карда мешавад ва тавассути экрани сенсории 15 дюйм ба осонӣ идора карда мешавад.
Вали кранка аз пӯлоди 40Cr сохта шудааст.
Оҳан HT300 барои чорчӯбаҳои мошин ва плитаҳо
7 маҷмӯаи панҷараҳои грипперҳо бо грепперҳо аз хӯлаи алюминийи сабук ва пойдору бо қабати ултра сахт ва марраи анодшуда бақайдгирии коғази дақиқ ва пайвастаро таъмин мекунанд.
Бари баландсифати гриппер аз Ҷопон бо умри дароз
Бари беҳамто тарҳрезишуда барои ҷуброн барои суғуртаи бақайдгирии дақиқи коғаз ба фосила лозим нест
Табақҳои буриши ғафсии гуногун (1 дона 1 мм, 1 дона 3 мм, 1 адад 4 мм) барои иваз кардани кор осон
Занҷири баландсифати Renold аз Англия бо табобати пешакии дарозмуддат устуворӣ ва дақиқиро дар дарозмуддат таъмин мекунад.
Системаи гардонандаи индекси фишори баланд барои назорати ҷойгиршавии бари гриппер
Дастгоҳи муҳофизати изофабор бо маҳдудкунандаи момент сатҳи баландтарини амниятро барои оператор ва мошин эҷод мекунад.
Системаи автоматии молиданӣ ва хунуккунӣ барои гардонандаи асосӣ ва молидани автоматӣ барои занҷири асосӣ.
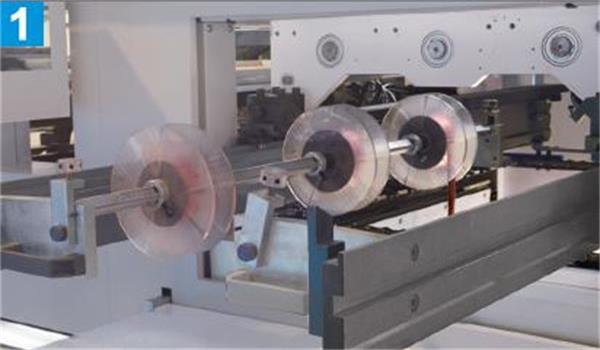
3. Дастгоҳи штампкунии фолга
Роликҳои кашонидани фолгаи барномарезишавандаи инфиродӣ (3 маҷмӯа дар дарозӣ ва 2 маҷмӯа дар самти трансверсалӣ), ки аз ҷониби муҳаррикҳои серво YASKAWA ронда мешаванд
Системаи дарозии пурра формати ғизодиҳии фолга барои штампкунӣ дар 2 самт дар як вақт, ки барои сарфаи фолгаҳо ва инчунин вақти иваз кардани фолгаҳо кӯмак мекунад.
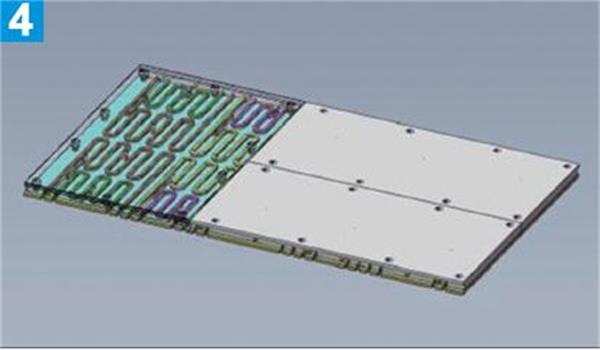
20 минтақаи гармидиҳии инфиродӣ, ки бо истифода аз системаи гармидиҳии интубатсия, бо таҳаммулпазирӣ дар ҳудуди ± 1С
(1) маҷмӯаи таъқиби асали мумдори оҳанин ва дастгоҳи қулф барои штампҳо
Дастгоҳи вақт барои штампкунии майдони калон
(2) дастгоҳи ҷудокунии самти ҳаво
Системаи хасу фолгаи истифодашударо аз паҳлӯи мошин хориҷ мекунад, ки онро дар он ҷо ҷамъ кардан ва партофтан мумкин аст.
Сенсорҳои оптикӣ шикастани фолгаро муайян мекунанд.
Бозгашти фолгаи ихтиёрии WFR-280 барои партофтани фолгаи истифодашуда, имкон медиҳад, ки фолгаҳо ба шаш чоҳи мустақил дар модули махсус печонида шаванд.

4. Шӯъбаи интиқол
Чӯткаи танзимшавандаи тормоз, ки аз ҷониби муҳаррики AC идора мешавад, барои холӣ кардани коғаз аз гиреҳ ва ҷамъ кардани коғаз бо суръати баландтар ва ҳамоҳангии комил кӯмак мекунад.
Баландии сутуни интиқол то 1350 мм аст.
Дастгоҳҳои фотоэлектрикӣ, ки аз ҳад зиёд боло рафтан ва аз ҳад зиёд фуромадани коғази интиқолро пешгирӣ мекунанд
Пулро тавассути сенсори оптикӣ (стандартӣ) ҳисоб кардан мумкин аст ва дастгоҳро бо дастгоҳ барои ворид кардани коғазҳои коғазӣ ба чӯб (ихтиёрӣ) муттаҳид кардан мумкин аст.Он барои гирифтани бланкаҳо ва бастабандии онҳо ба қуттиҳо мусоидат мекунад.
Тамоми мошинро тавассути монитори сенсории 10,4 дюймӣ дар қафо танзим кардан мумкин аст
Рақаи интиқоли ёрирасон барои интиқоли беист танзим карда шудааст.
5. Қисмҳои барқӣ
Детекторҳои электронӣ, ҳуҷайраҳои микро коммутатсионӣ ва фотоэлектрикӣ, ки аз ҷониби PLC дар тамоми мошин идора карда мешаванд
Калиди камераи электронӣ ва рамзгузор
Тамоми амалиёти асосиро тавассути мониторҳои сенсории 15 ва 10,4 дюйм анҷом додан мумкин аст.
Эстафетаи бехатарии PILZ ҳамчун стандарт стандарти баландтарини бехатариро таъмин мекунад.
Калиди қулфи дохилӣ ба талаботи CE ҷавобгӯ аст.
Қисмҳои барқӣ, аз ҷумла Moeller, Omron, реле Шнайдер, контактори AC ва шикастани ҳаворо барои таъмини субот дар дарозмуддат истифода мебарад.
Намоиши автоматии хатогиҳо ва худидоракунии ташхис.

6. Дигарон
Платформаи амалиётӣ бо контроли гармидиҳӣ
1 маҷмӯи асбобҳо ва дастури истифода
| Андозаи варақ | (Макс)1060X760мм |
| (Мин) 450X370мм | |
| Андозаи буридан | (Макс)1045X745мм |
| Андозаи штамп | (Макс) 1020X740мм |
| Суръати буридан | (Макс) 7500(С/Х) |
| Суръати штамп | (максимум) 6500 (S/H) |
| Суръати штампкунии голограмма | (максимум) 5500 (S/H) |
| Когаз | (дақиқа)Картошкаи 90—2000г/м2, 0,1—3мм |
| Тахтаи бадалдор (танҳо дар буридан) | ≤4мм, Э、Б най |
| Фишори максималии буридан | 320 тонна |
| Минтақаи гармидиҳӣ | 20 Минтақаҳои гармидиҳӣ, ҳарорати20℃--200℃ |
| Маржаи нигоҳдории танзимшаванда | 7-17мм |
| Баландии сутуни ғизодиҳанда | (Макс)1600мм |
| Баландии пӯлоди интиқол | (Макс)1350мм |
| Қувваи асосии мотор | 11КВт |
| Қувваи умумӣ | 46 кВт |
| Вазни умумӣ | 19 тонна |
| Андоза | 6260X4560X2580мм |
| Номи Қисм | Бренд | Кишвари аслӣ | Эзоҳ |
| Подшипник | NSK | Япония | |
| Подшипник | SKF | швейтсарӣ | |
| Клапанҳои электромагнитӣ ва ҷузъҳои пневматикӣ | SMC | Япония | |
| Қуттии индекс | Тайван | ||
| Монитор | Тез | Япония | |
| Gripper | Япония | ||
| Занҷири асосии Gripper | Ренольд | Британияи Кабир | |
| Насоси вакуумӣ | Бекер | олмонӣ | |
| Қуттии индекс | Тайван | ||
| Чаҳорчӯбаи буридан | Хитой | Шабакаи интегралӣ | |
| 20 минтақаи гармидиҳии инфиродӣ | олмонӣ | Қубури гармидиҳӣ | |
| Моторҳои серво барои ролики фолга | Яскава | Япония | |
| Занҷири интиқол | Япония | ||
| Ғизодиҳанда | Хитой | ||
| Инвертори асосии мотор | Шнайдер | олмонӣ | |
| Моторҳои асосӣ | Siemens | олмонӣ | |
| Камари интиқол | Нитта | Япония | |
| Тугмаҳо ва ҷузъҳои электрикӣ | Итон | олмонӣ | |
| Ҳалқаи мӯҳри гидравликӣ | олмонӣ | ||
| Маҳдудкунандаи момент | Тайван | ||
| Ҳаво шикастан, контактор ва пайванд | Шнайдер, Этон, Моллер | олмонӣ | |
| Эстафетаи бехатарӣ | ПИЛЗ | олмонӣ | |
| Шохи электронӣ | Патлит | Япония | |
| Шафтҳои кранка | Хитой | 40 Cr муомилаи гармии сахт | |
| Асои кирм | Хитой | 40 Cr муомилаи гармии сахт | |
| Gear Worm | Хитой | Мис |
Таъқиби асал = 1 дона
Таъқиби буриш = 1 дона
Табақи буриши 1мм = 1 дона
Табақи буриши 3мм = 1 дона
Табақи буриши 4мм = 1 дона
Бари гиреҳ = 1 дона
Дандони қафас = 5 дона

Детектори Supersonic Дучанд варақ
Бартарафкунандаи статикии ғизодиҳанда / минтақаи интиқол

Тағйирдиҳандаи таъқиб

Системаи голограмма
Системаи голограмма

Системаи голограмма

Бозгашти фолгаи паймон

Воридкунандаи лента